高齢者動作模擬装置
ヒトを用いた実験によるロボット介護機器の評価やトレーニング、安全面、倫理面等から容易ではありません。また従来、衝突試験用人体ダミーや、介護実習用人体モデルなど、様々なダミー人形が開発されていますが、大きな形状変形や複雑な接触状態が生じるロボット介護機器の評価に適したものはありませんでした。
そこで、ロボット介護機器の初期段階で被介護者への影響(力学面を中心として)の評価を行ったり、使い方に関する問題点を確認するためのダミー(高齢者動作模擬装置)を,ロボットを技術を用いて開発しました(図1)。このダミーは、機器の形状に応じた様々な姿勢を取ることができ、また機器の変形に合わせて動くことができます。高齢者の標準的な身体形状に近く設計されています(身長165cm,体重約50kg)が、自立して歩くことはできません。空気圧アクチュエータによる可動関節を22 個,角度が計測可能な受動関節を28個持っており、可動関節は位置制御または力制御が可能です。また、全身は柔軟素材により覆われています。
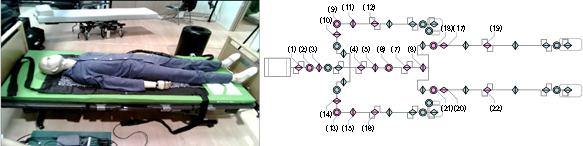
図1 高齢者動作模擬装置の外観と自由度配置(ピンク:駆動関節、水色:受動関節)
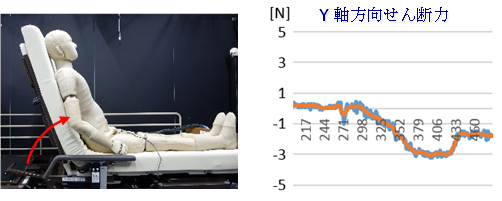
図2 ベッド背上げ動作時のせん断力計測の例
ロボット介護機器と高齢者の身体の間で発生する力を計測するために、3軸(垂直方向の圧力およびせん断力)を計測可能なセンサをロボットの腰部表面へ取り付けて、計測実験を行いました。その結果、介護ベッド上で背上げをした際に、せん断力が働く様子を可視化することができるようになりました(図2)。また、全身関節の角度を計測するセンサも内蔵されているため、図3に示すようにヒトの全身姿勢を推定することも可能です。
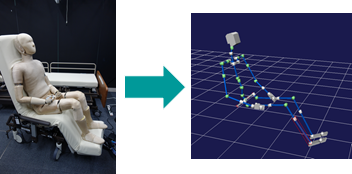
図3 高齢者動作模擬装置を用いた姿勢計測の例
このダミーを用いて、具体的なロボット介護機器上でヒトの体がどのような姿勢になるか、どのような力がかかるかを計測し評価する研究を進めています。また、ヒトの体へのより正確な影響を推定するために、殿部の骨格・筋肉など内部構造を詳細に模擬したモデルも開発中です。