Elderly Movement Simulating Device
Assessment of robot nursing devices by using human subjects in experiments is not easy because of the concerns involving training, safety, ethics, etc. Although various dummies for impact tests and for nursing training have been developed, there are no dummies that are suitable for the assessment of robot nursing devices that can lead to major distortions in shapes and complicated contact conditions.
Therefore, we have utilized robot technology to develop a dummy (elderly movement simulating device) that can be used to assess the effect on people being nursed during the initial stages of robot nursing device development (mainly mechanical aspects) and to confirm any issues regarding use. (Figure 1) This dummy can be positioned in various ways according to the shape of the device being assessed and it can also move according to the movements of the device. The dummy is built close to the standard physical dimensions of the elderly (165 cm height and 50 kg weight), but it cannot walk by itself. It has 22 movable joints that use pneumatic actuators and 28 passive joints for which angles can be measured. The movable joints can be controlled by positioning control or power control. The entire body of the dummy is covered with a soft material.
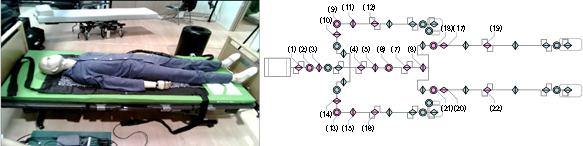
Fig. 1. The Appearance of the elderly movement simulating device and possible positions (Pink: dynamic joints; light blue: passive joints)
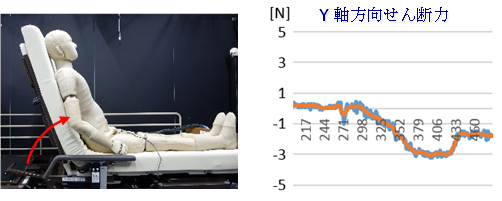
Fig. 2. Example of shearing force measurement when lifting a person's back on a bed
In order to measure the forces that develop between robot nursing devices and elderly people, we attached sensors that allow the measurement of three axes (vertical pressure and shearing force) on the surface of the robot's lower back to conduct a measurement experiment. The results showed that it was possible to visualize the shearing force produced when the back was pulled upward on a nursing bed. (Figure 2) Because there are sensors to measure the angles of all the joints, it is possible to estimate the positioning of the entire body as shown in Figure 3.
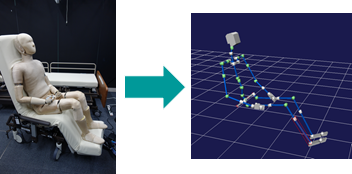
Fig. 3. Example of position measurement using the elderly movement simulating device
We are conducting research on measuring and assessing the different forces that are applied to the human body when specific robot nursing devices are used by using this dummy. We are also developing a model that simulates in greater detail the bone and muscle structure of the buttocks in order to more accurately estimate the effects on the human body.