力学モデルに基づく設計支援ツール
力学モデルに基づくロボット介護機器の設計支援ツールを、産業技術総合研究所で開発している人体モデル化・シミュレーションソフトウェア「DhaibaWorks」を使用して開発しています。この設計支援ツールは、大きく3つのフェーズ「製品のモデル化」「人体動作シミュレーション」「評価シミュレーション」から構成されています。
「製品のモデル化」フェーズでは、設計対象となる機器製品の寸法や動き方(設計パラメータ)を変更した際に、使用者に与える結果をDhaibaWorks上でシミュレーションできるようにするためのモデリングを行います。
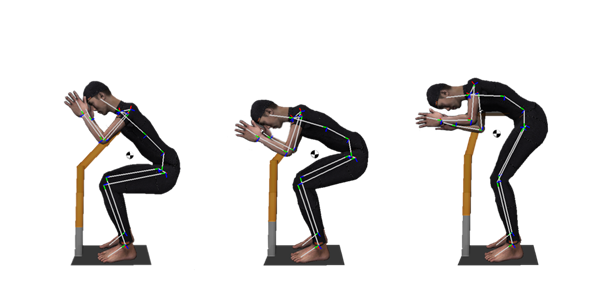
「人体動作シミュレーション」フェーズでは、上記の設計パラメータおよび使用者の人体モデルをさまざまに変更したときに、機器の使用者の姿勢や動きを計算機上に再現します。機器使用時の人体の姿勢については、操作時に人体と接触する部分(把持部、膝パッド、胸部など)を定義して、最も可能性が高いものをロボット工学技術の一つである逆運動学を用いて自動的に計算します。計算された人体姿勢の妥当性は、代表的な姿勢における人間の姿勢を3次元形状計測装置で計測し、これと比較することで確認しました。
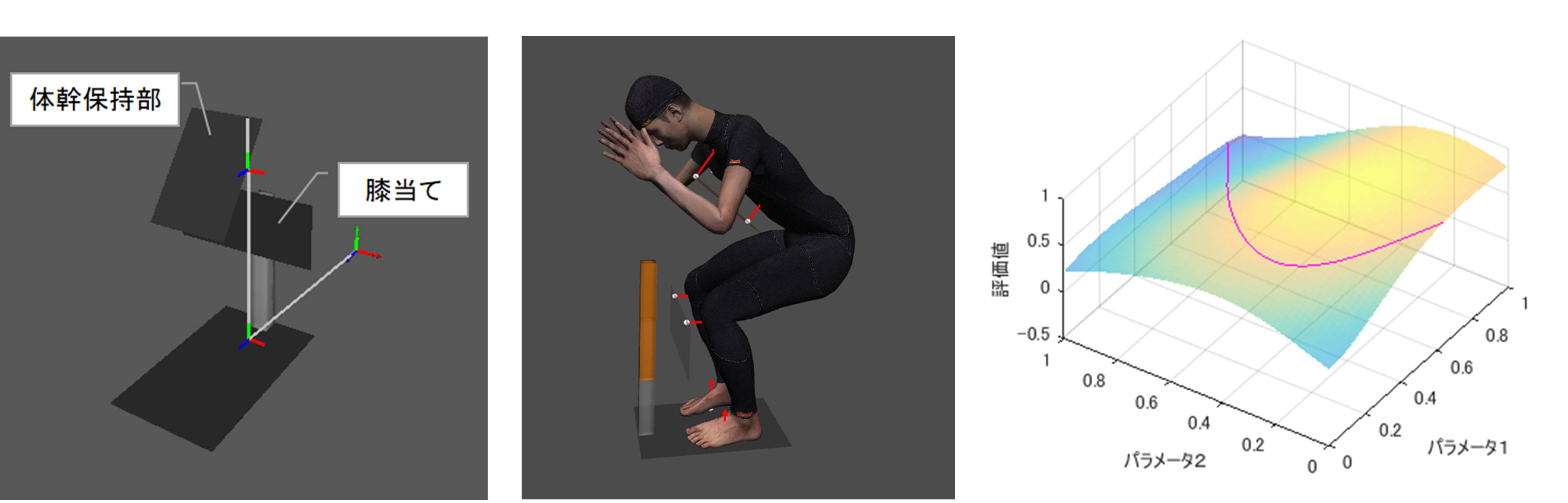
「評価シミュレーション」フェーズでは、前フェーズで再現される人体の動作に対して、接触により生じる力や関節に発生する力を推定し、機器使用時の人体の負担を評価します。設計において何を優先して評価するかは、機器の使用目的や対象とする使用者により異なり、例えば腰の負担をなるべく小さくしたい場合もありますし、パッドから胸部にかかる力を小さくしたい場合も考えられます。評価対象を決めた後は、最適化工学技術を用いて、機器や人間の制約を考慮して設計パラメータを決定します。図1は、移乗用のロボット介護機器の動作軌道設計支援を例として、上記3フェーズの結果を示しています。また図2は、腰の負荷を最も小さくする支援機器の動きを示しています。
今後、ロボット介護機器開発・導入促進事業に参画する開発事業者を中心にこの設計支援ツールの導入を促進して、その意見を反映してさらに開発したツールの利用性や適用性を高めていく予定です。
製品モデル化
(移乗支援)
人体動作シミュレーション
における人体姿勢再現
評価シミュレーション
(腰の負荷と機器の動き)