Design Aid Tool Based on Dynamic Models
We are developing a robot nursing device design aid tool based on dynamic models by using the Dhaiba Works human body modeling and simulation software developed by the National Institute of Advanced Industrial Science and Technology. This design aid tool is made up of three major phases: Product modeling, human body movement simulations, and assessment simulations.
In the product modeling phase, the modeling will be such that the effects on users will be simulated on Dhaiba Works when the dimensions and operation (design parameters) of the subject device are changed.
In the human body movement simulation phase, the position and movement of the user will be reproduced on a computer when the above design parameters and user human body model are changed. With respect to the position of the human body when a device is used, the areas that come into contact with the human body during operation (grips, knee pads, chest sections, etc.) will be defined, and the most likely areas will be automatically calculated by using reverse kinematics which is a robot engineering technology. Concerning the validity of the calculated human body positions, they were compared with typical human postures measured with a 3D shape measuring device.
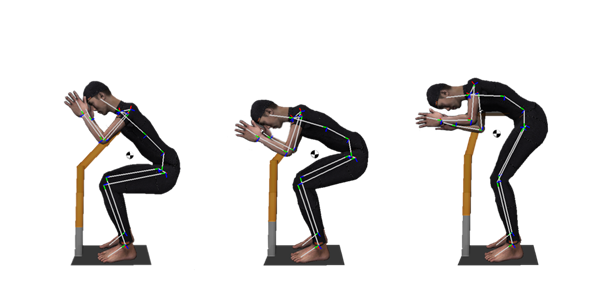
In the assessment simulation phase, the strength and stress on joints that will result from contact from the human body movement reproduced in the preceding phase will be estimated to assess the load on the human body when the device is used. What will be given priority during design will differ according to the use and subject users of each device. For example, there will be instances when minimizing loads on the lower back will be important, and other cases in which reducing the pressure on the chest pads will be important. After the subject of the assessment is determined, optimization engineering technology will be used to determine the design parameters by considering the limitations of the device and human beings. Figure 1 shows the results of the three above phases using an example of operation track design aid for a transfer robot nursing device. Figure 2 shows the movement of the aid device to minimize the load on the lower back.
We will promote the introduction of this design aid tool by developing organizations that participate in the Project to Promote the Development and Introduction of Robotic Devices for Nursing Care. Then, we plan to further improve the convenience and applicability of this developed tool by listening to the opinions of the developing organizations.
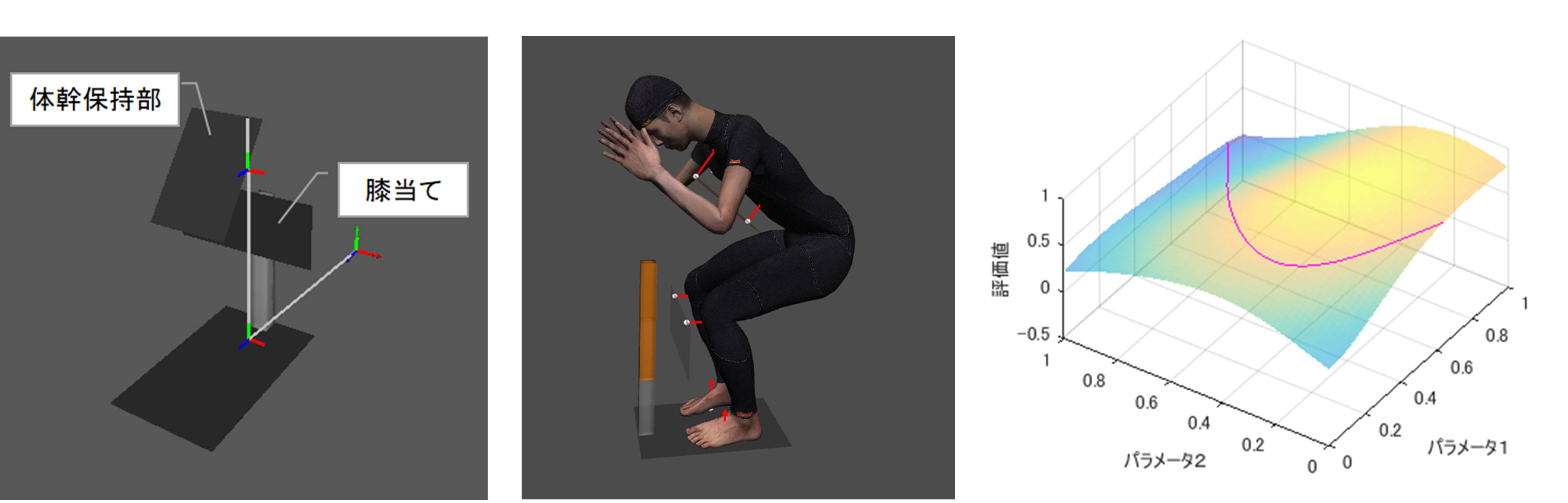
Product modeling
(transfer aid)
Human body position reproduction
during human body movement simulation
Assessment simulation
(load on the lower back and device movement)