Simulator for Elderly Movement
Evaluating robotic care devices through human experiments—including training, safety, and ethical considerations—is no easy task. Furthermore, while various types of dummies have been developed in the past, such as crash test dummies and human models for care training, none were suitable for evaluating robotic care devices, which involve significant deformation and complex contact conditions.
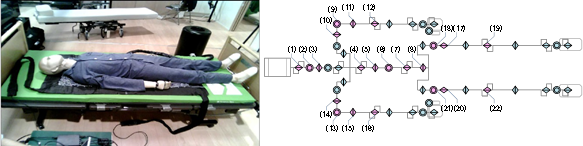
Therefore, we developed a dummy (an elderly motion simulation device) using robotic technology to evaluate the impact on care recipients (primarily from a biomechanical perspective) during the early stages of robotic care device development and to identify issues related to usage (Figure 1). This dummy can assume various postures corresponding to the device’s shape and can move in accordance with the device’s deformation.It is designed to closely resemble the standard body shape of an elderly person (height 165 cm, weight approximately 50 kg), but it cannot walk independently. It features 22 movable joints driven by pneumatic actuators and 28 passive joints capable of angle measurement; the movable joints can be controlled either by position or force. Furthermore, the entire body is covered with a flexible material.
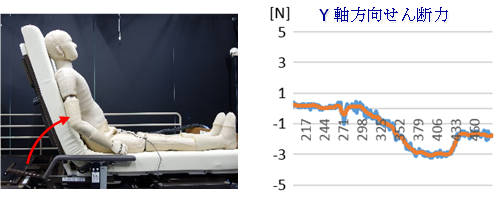
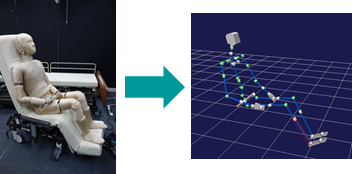
To measure the forces generated between robotic care devices and the elderly person’s body, we conducted measurement experiments by attaching sensors capable of measuring three axes (vertical pressure and shear force) to the surface of the robot’s waist. As a result, we were able to visualize the shear forces at work when the backrest of the care bed was raised (Figure 2). Furthermore, since the robot is equipped with sensors that measure the angles of all body joints, it is also possible to estimate the person’s overall posture, as shown in Figure 3.
Using this dummy, we are conducting research to measure and evaluate the postures the human body assumes and the forces exerted on it when used with specific robotic care devices. We are also developing a model that simulates the internal structure of the buttocks—including bones and muscles—in detail to estimate the effects on the human body more accurately.