介護ロボットで
快適な未来へ

3/14(木)【ハイブリッド開催】令和5年度AMED ロボット介護機器開発等推進事業(環境整備)成果報告会開催のお知らせ【会場:有明セントラルタワーホール&カンファレンス】
【AMED公募情報】「令和6年度 ロボット介護機器開発等推進事業(開発補助・海外展開)」に係る公募のお知らせ(公募期間:令和6年1月26日(金) ~ 令和6年3月19日(火)【正午〆切】)
【AMEDイベント情報】2024/1/21(日)「AMEDサルコペニア・フレイルシンポジウム ~事業連携を通じた成果の創出に向けて~」オンライン開催のお知らせ【申込期限:2024/1/18(木)】
【会員限定】9/29開催H.C.R.2023(国際福祉機器展)出展者プレゼンテーションの動画を公開しました(登壇者:長岡介護イノベーション・ハブ 武藤睦治氏、社会福祉法人友愛十字会 鈴木健太氏)
本サイトは、ロボット介護機器に携わる全ての方に、介護現場で安全かつ効果的に活用できるロボット介護機器のあり方について正しく理解し、開発や活用を推進いただくことを目指しています。本サイトでは、経済産業省・国立研究開発法人日本医療研究開発機構(AMED)¹が進めている「ロボット介護機器事業²」をはじめとする介護現場へのロボット介護機器導入やロボット介護機器開発に関する国、団体、企業などの様々な情報をご提供します。

このサイトでわかること
•ロボット介護機器について
•AMEDのロボット介護機器関連事業の取り組み
•上記事業の成果物の紹介
•関連セミナー/イベント等の開催情報
•その他、ロボット介護機器関連情報
より良い介護の実現に向けて、ロボット介護機器の開発・導入にご興味のある皆様にご活用いただけますと幸いです。
1
AMED(エーメド)は、2015年4月に設立された、医療分野の研究開発およびその環境整備の中核 的な役割を担う国立研究開発法人です。基礎から実用化までの一貫した医療研究開発の推進と、その成果の円滑な実用化を図るとともに、研究開発環境の整備を総合的かつ効果的に行うために様々な取り組みを行っています。
2
令和3年度より国立研究開発法人日本医療研究開発機構(AMED)が進めている「医療機器等にお ける先進的研究開発・開発体制強靭化事業(ロボット介護機器開発等推進事業)」や、その前身 となる「ロボット介護機器開発・導入促進事業」(平成25~29年度)および「ロボット介護機器 開発・標準化事業」(平成30~令和2年度)がこれに該当します。
ロボットとは センサー等により外界や自己の状況を
①認識し(センサー系)
②得られた情報を(知能・制御系)
③結果に応じた動作を行う(駆動系)
という3つの要素技術を有する、知能化した機械システムのことを指します。
ロボット介護機器(介護ロボット)とは 下記の「ロボット」が応用され、
①介護現場の生産性向上
②利用者の自立支援
③介護者の負担の軽減
に役立つ介護機器を「ロボット介護機器(介護ロボット)」と呼んでいます。
開発研究が盛んに行われるようになった介護ロボットですが、その「実用化」に向けては、研究・開発の途上にあります。「ロボット介護機器開発・導入促進事業」は実用化に向けて進められている事業です。
実用的なロボット介護機器開発にむけた基本方針として次の2点を求めています。
ロボット介護機器の目的と効果を、「人」に対する影響としてみる。機会としての性能だけを追求するものではありません。「『人』の生活・人生をよくする」という目的を明確に持って介護ロボットを開発し、活用していくのです。
ロボット介護機器は、「よくする介護」を実践するための物的介護手段として位置づけます。不自由なことを補うだけの補完的介護手段ではありません。人が行う介護との相互関係を考慮した介護プログラム全体の中に位置づけています。
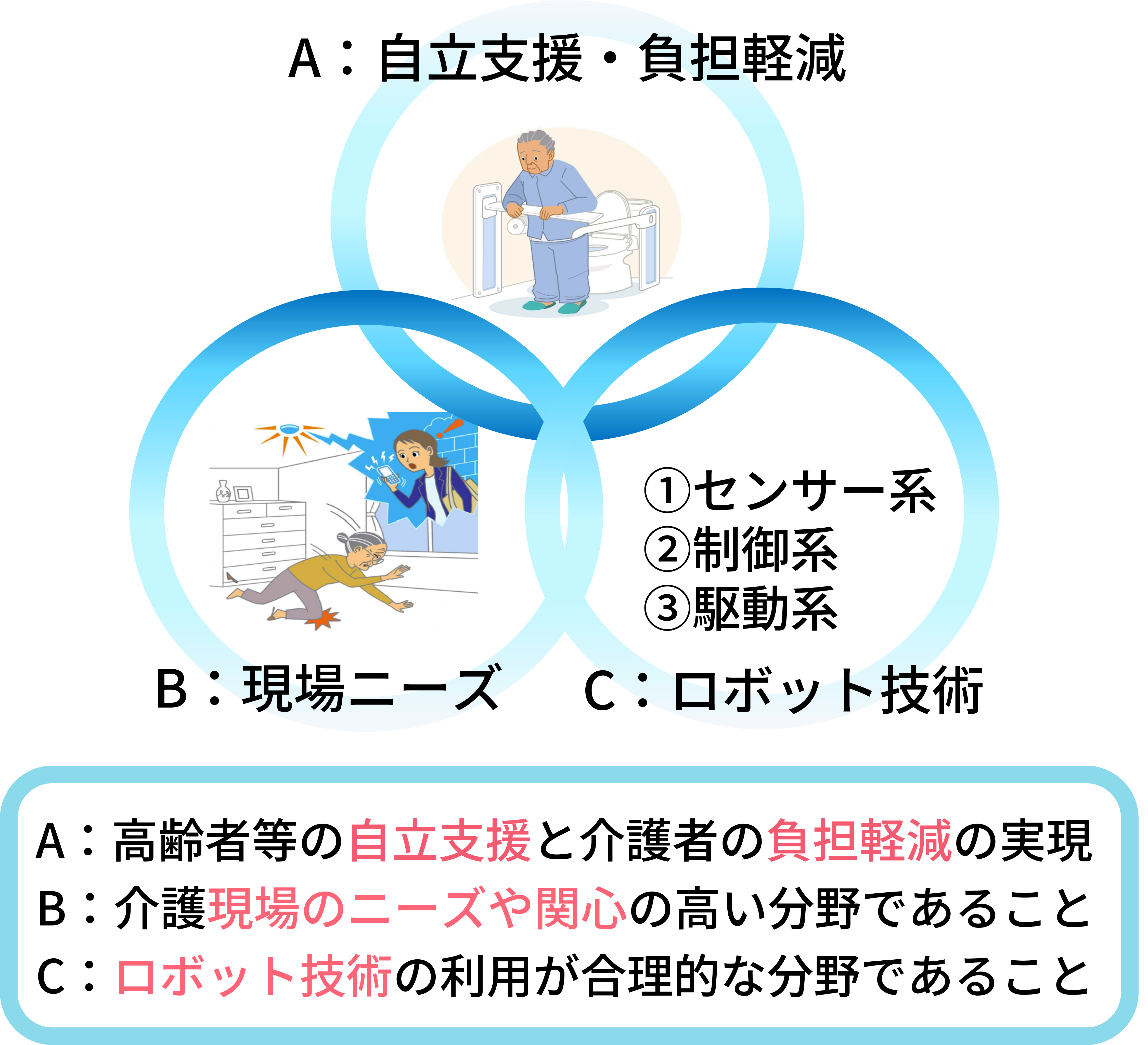
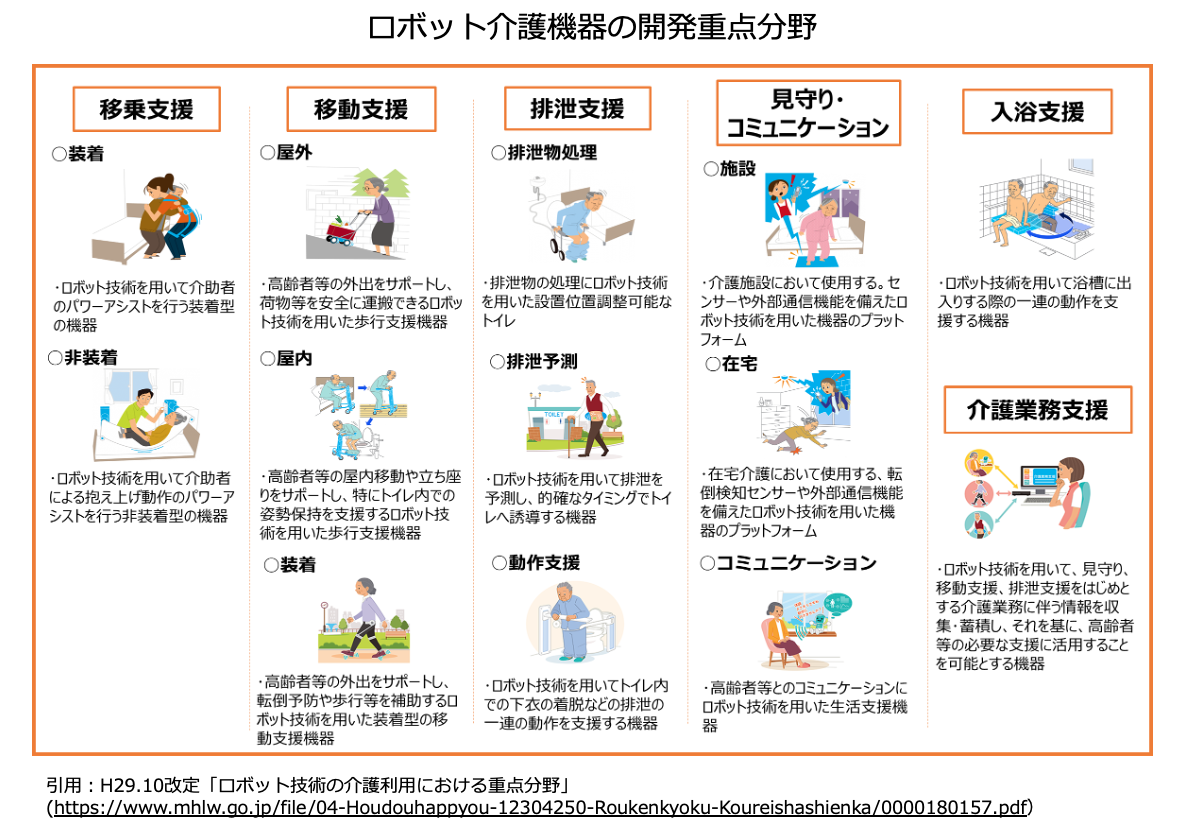
経済産業省と厚生労働省はロボット技術による介護現場への貢献や新産業創出のため、以下のA〜Cの3つの条件をもとに「ロボット技術の介護利用における重点分野」を策定しました。この重点分野に対して補助金等の支援事業が実施されています。